K-во вопросов= 38
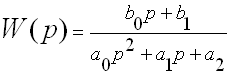
1

Передаточная функция W(p) определяется
выражением
 .
.
Какова передаточная функция
замкнутой системы Ф(p)?
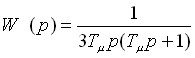
2
Передаточная функция W(p) определяется
выражением
. Какова передаточная функция
замкнутой системы Ф(p)?
3
Имеется
дифференциальное уравнение системы при нулевых начальных условиях и ее
передаточная функция. Что из них дает большую информацию о системе?
4
Что является
необходимым и достаточным условием устойчивости линейной АСР?
5
Передаточная функция
разомкнутой АСР

Как выглядит
характеристическое уравнение замкнутой системы?
6
Что дает введение
интеграла в закон регулирования?
7
Имеется
передаточная функция системы
Как получить
из нее статический коэффициент передачи?
8
Какой типовой
регулятор описывается уравнением? 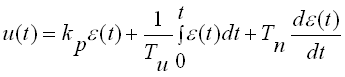
ε(t) -
ошибка регулирования; u(t) - управляющее воздействие.
9
Какую
передаточную функцию имеет статический объект управления?
10
Передаточная
функция астатической разомкнутой АСР имеет вид:

укажите, характерный признак астатизма системы.
11
Каким образом
передаточная функция замкнутой системы зависит от передаточной функции
разомкнутой?
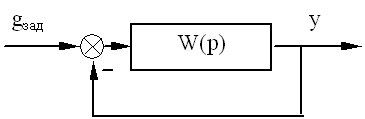
12
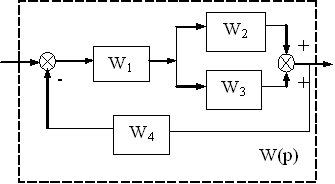
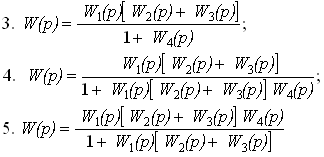
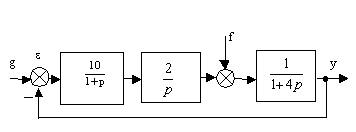
На
рисунке представлена структурная схема системы управления. Укажите передаточную
функцию этой системы.

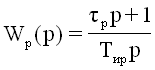
13
Какой регулятор имеет
передаточную функцию
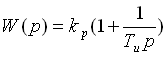
где Кр - коэффициент
усиления регулятора; Ти - постоянная времени?
14
На рисунке
приведена структурная схема АСР. Оцените точность системы при отработке двух
видов входных воздействий: задающего входа g и возмущения f.
15
Цифровой аналог какого
регулятора имеет вид:

16
Электрическим
электроприводом называется:
17
На рисунке:
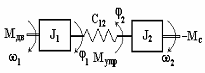
приведена кинематическая схема:
18
В основном
уравнении движения электропривода
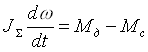
величина

это:
19
Механическая мощность
электропривода определяется как:
20
Если
соотношение электромагнитного момента двигателя и момента статического
сопротивления Мэд > Мс, то:
21
Активный
момент сопротивления на валу двигателя в электроприводе характеризуется тем,
что:
22
Рабочей точкой
на механической характеристике электродвигателя называется
23
Механическая
характеристика электропривода это зависимость:
24
Механическая
постоянная времени электропривода постоянного тока определяется выражением:
25
В
системе электропривода постоянного тока по системе тиристорный -преобразователь
- двигатель в качестве малой некомпенсируемой постоянного времени системы
Тμ принимается:
26

На приведенной схеме изображен аналоговый
регулятор типа:
27
Передаточная
функция
является функцией:
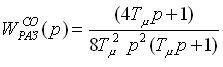
28
Передаточная
функция контура с большой постоянной времени в интегрирующем звене, настроенного
на симметричный оптимум, будет:
29
Однократно
интегрирующая система электропривода по системе ТП-Д содержит:
30
Двукратно
интегрирующая система электропривода по системе ТП-Д содержит:
31
Статическая
ошибка в двукратно интегрирующей системе ТП-Д:
32
Структура
САУ электроприводом с последовательной коррекцией наиболее распространенная и
предпочтительная благодаря:
33
Система
прямого цифрового управления электроприводом постоянного тока реализует:
34
Интегральная
оценка качества процесса управления по скорости
является:
35
Мехатронный
модуль движения представляет собой:
36
В современных
системах электропривода переменного тока с широтно-импульсной модуляцией (ШИМ)
наиболее применяемыми полупроводниковыми элементами силовых преобразователей
частоты являются:
37
Цифровая система
управления электроприводом в сравнении с аналоговой обеспечивает:
38
Применение
нечеткого регулятора (FUZZY-регулятора) обеспечивает в системе
электропривода: