Лекция №7
«Z – преобразование»
Z –
преобразование является одним из математических методов анализа и
проектирования дискретных систем.
Аппарат z-преобразования играет для
цифровых систем ту же роль, что и преобразование Лапласа для непрерывных
систем.
Мотивировку
использования z-преобразования для исследования дискретных систем
можно пояснить на примере преобразования Лапласа квантованного сигнала. Если выходной
сигнал идеального импульсного элемента fd(t) определен как
![]() (7.1),
(7.1),
то преобразование Лапласа для fd(t) определяется выражением
![]() (7.2).
(7.2).
выражение
для Fd(p) не является рациональной
функцией относительно p, поскольку содержит
множитель e-Tp. Для упрощения анализа
желательно преобразовать иррациональную функцию Fd(p) в рациональную посредством
замены комплексной переменной p на другую комплексную
переменную z. Выбор такой замены очевиден
![]() (7.3).
(7.3).
При этом обратное соотношение имеет вид
![]() (7.4).
(7.4).
В этих выражениях T – период квантования, z –
комплексная переменная, действительная и мнимая части которой определяются как
![]() (7.5),
(7.5),
где
![]() (7.6).
(7.6).
Подставляя
новую переменную z в выражение (7.2) получим
![]() (7.7),
(7.7),
что является рациональной функцией относительно z.
Выражение
(7.7) называется z-преобразованием функции f(t).
Поскольку
z-преобразование функции получается из ее преобразования Лапласа, то в
общем для любой функции f(t), имеющей преобразование
Лапласа, существует также и z-преобразование.
Процедура
нахождения z-преобразования непрерывной функции f(t) включает
следующие этапы:
-
определение fd(t) как выходного сигнала
идеального импульсного элемента для входной функции f(t);
-
определение преобразования Лапласа fd(t)
![]() ;
;
-
замена eTp на z в выражении для Fd(p), чтобы получить
![]() .
.
Выражение
(7.7) используется для нахождения z-преобразования функции f(t).
Однако неудобство этого выражения состоит в том, что оно является бесконечным
рядом, а не эквивалентной функцией в компактной форме.
Альтернативное
выражение для z-преобразования функции можно получить, если
использовать ее изображение F(p) и теорему о вычетах. Так,
если функция f(t) имеет изображение F(p),
которое представимо в виде
![]() (7.8),
(7.8),
то z-преобразование этой функции
можно найти в виде
![]() (7.9),
(7.9),
где xn
– простые полюса функции F(p), k – число этих полюсов.
Если F(p) имеет кратные полюсы p1, p2, …, pk с кратностью m1, m2, …, mk соответственно, тоz-преобразование F(p) можно
найти в виде
 (7.10),
(7.10),
где
 (7.11).
(7.11).
Проектирование
непрерывных систем часто основывается на анализе распределения нулей и полюсов
передаточной функции системы на плоскость комплексной переменной p.
Аналогично, полюсы и нули z-преобразования передаточной
функции определяют реакцию системы в моменты дискретизации. Поэтому важно
определить сответствие между плоскостью комплексной переменной p и
плоскостью комплексной переменной z.
Как
было установлено ранее, преобразование Лапласа дискретной функции fd(t) является переиодической функцией с периодом jws,
где ws
– частота дискретизации. В соответствии с этим плоскость комплексной переменной
p можно разделить на бесконечное число периодических полос (рис.7.1).
Основная полоса расположена в диапазоне частот от -ws/2
до +ws/2,
а дополнительные полосы расположены в диапазоне от -ws/2
до -3ws/2,
от -3ws/2
до -5ws/2
и т.д. для отрицательных частот и от ws/2 до 3ws/2,
от 3ws/2
до 5ws/2
и т.д. для положительных частот. Если рассматривать только основную полосу, то
контур 1-2-3-4-5-1, расположенный в левой половине p-плоскости, отображается
преобразованием z=eTp в единичную окружность на z-плоскости
с центром в начале координат (рис.7.2).
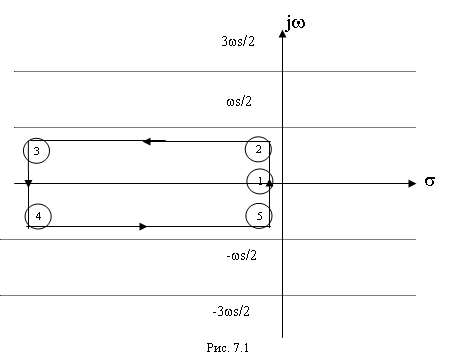
Так
как
![]() (7.12)
(7.12)
для целых n, то все другие
дополнительные полосы в левой половине p-плоскости отображаются в
тот же самый единичный круг на z-плоскости. Все точки левой
половины p-плоскости отображаются внутрь единичного круга на z-плоскости.
Точки правой половины p-плоскости отображаются в области вне единичного круга на z-плоскости.
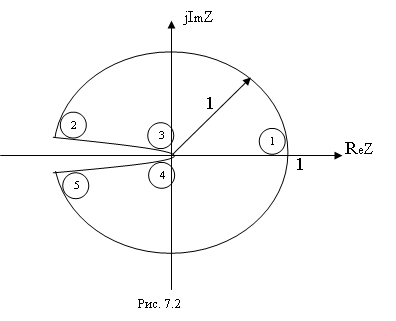
Линии
постоянного затухания, описываемые на p-плоскости уравнением s=s1 отображаются на z-плоскости
в окружность с радиусом ![]() и с центром в начале
координат (рис.7.3).
и с центром в начале
координат (рис.7.3).
Линии постоянной частоты, описываемые на p-плоскости
уравнением w=w1 отображаются в луч,
исходящий из начала координат под углом w1T
радиан. Угол измеряется от положительного направления действительной оси.
Преобразование
Лапласа и его обратное преобразование являются однозначными, т.е. если F(p) есть
преобразование Лапласа для функции f(t), то f(t)
является обратным преобразованием Лапласа для функции F(p). Для z-преобразования
обратное z-преобразование не является однозначным. Корректный
результат обратного z-преобразования функции F(z) есть f(kT),
которая равна f(t) только в моменты
квантования t=kT.
В
общем случае обратное z-преобразование может быть
определено одним из следующих методов.
Метод разложения на простые дроби.
Известно, что z-преобразованием для функции f(kT)=Ae-akT
является функция Az/(z-e-aT).
Таким образом, если удастся представить функцию F(z)
в виде
![]() (7.13),
(7.13),
то функция f(kT), которая является обратным
z-преобразованием для функции F(z) будет иметь вид
![]() (7.14).
(7.14).
Следуя данному методу необходимо:
-
разложить на простые множители функцию F(z)/z;
![]() (7.15),
(7.15),
-
умножить обе части получившегося
выражения на z
![]() (7.16),
(7.16),
-
записать выражение для обратного z-преобразования как сумму
отдельных составляющих, каждая из которых соответствует своему слагаемому в
выражении для F(z).
Метод разложения в степенной ряд. Из (7.7) следует, что
![]() (7.17).
(7.17).
Следоватеельно, коэффициенты ряда соответствуют
значениям f(t) в моменты квантования.
Таким образом, из записи ряда можно получить выражение для f(kT).
Формула обратного z-преобразования. Обратное z-преобразование можно получить с помощью формулы
![]() (7.18),
(7.18),
где G - замкнутый контур на z-плоскости,
включающий все особые точки F(z)zk-1.
При этом значение интеграла можно найти по теореме вычетов
![]() (7.19)
(7.19)
в полюсах F(z).
Свойства z-преобразования.
1. Суммирование и вычитание.
Если ![]()
то ![]() (7.20).
(7.20).
2. Умножение на константу. Если
![]() , то
, то
![]() (7.21),
(7.21),
где
a – константа.
3. Сдвиг во временной области.
Если ![]() , то
, то
![]() (7.22),
(7.22),
где
n – положительное целое число.
4. 4. Смещение в области изображений. Если ![]() , то
, то
![]() (7.23),
(7.23),
где
a – константа.
5. Теорема о начальном
значении. Если ![]() и если существует
предел
и если существует
предел ![]() , то
, то
![]() (7.24),
(7.24),
т.е. значение дискретного
сигнала f(t) при
t=0 определяется значением F(z) при z=¥.
6. Теорема о конечном значении.
Если ![]() и если функция
и если функция ![]() не имеет полюсов на
окружности единичного радиуса и вне ее, то
не имеет полюсов на
окружности единичного радиуса и вне ее, то
![]() (7.25).
(7.25).
7. Теорема о свертке во
временной области. Если ![]() и f1(t)=f2(t)=0 при t<0,
то
и f1(t)=f2(t)=0 при t<0,
то
![]() (7.26).
(7.26).
Выражение
() называется сверткой во временной
области.
Поскольку
метод z-преобразования при анализе дискретных систем аналогичен методу
преобразования Лапласа при анализе непрерывных систем, необходимо найти способ
описания дискретной системы в терминах z-преобразования.
Для
линейной непрерывной системы (рис.7.4)
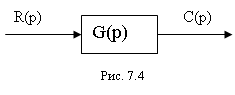
отношение между непрерывным выходным сигналом с(t) и
непрырывным входным сигналом r(t) описывается передаточной
функцией
![]() (7.27),
(7.27),
где R(p) и C(p) – преобразования Лапласа
входного и выходного сигнала системы соответственно. Преобразует эту системы в
дискретную, установив на входе и на выходе ее синхронизированные импульсные
элементы (рис.7.5).
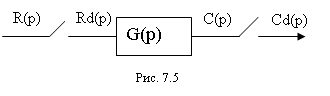
Если ко входу линейной
системы приложен дискретный сигнал rd(t), то выходной сигнал
системы можно записать в форме
![]() (7.28),
(7.28),
где g(t) – переходная функция
системы.
При t=kT, где k –
положительное целое число, это выражение примет вид
 (7.29).
(7.29).
Беря z-преобразование от обеих
частей последнего выражения и применяя теорему о свертке во временной области,
получим
![]() (7.30),
(7.30),
где
![]() (7.31)
(7.31)
называется импульсной
передаточной функцией линейной дискретной системы.
При
последовательном соединении двух дискретных систем с импульсными передаточными
функциями G1(z) и G2(z), частота дискретизации
которых одинакова, а моменты дискретизации синхронизированы, импульсная
передаточная функция системы в целом равна произведению импульсных передаточных
функций этих систем
![]() (7.32).
(7.32).
Экстраполятор
нулевого порядка имеет передаточную функцию
![]() (7.33).
(7.33).
Z-преобразование этой
функции, а следовательно импульсная передаточная функция экстраполятора
нулевого порядка равна
![]() (7.34).
(7.34).
Этот результат очевиден, так как экстраполятор
нулевого порядка в течение периода квантования удерживает постоянным дискретный
сигнал, полученный в результате дискретизации, и вычисление z-преобразования
для передаточной функции фиксатора должно определять исходный дискретный
сигнал. Однако в большинстве случаев на практике за экстраполятором нулевого
порядка следует непрерывная часть системы (рис.7.6).
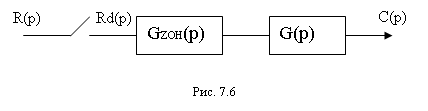
Z-преобразование выходного
сигнала такой системы равно
![]() (7.35),
(7.35),
где
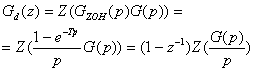 (7.36).
(7.36).
В данном случае z-преобразование числителя
передаточной функции экстраполятора нулевого порядка можно вынести за скобки в
соответствии с теоремой о сдвиге во временной области (7.22), однако z-преобразование
G(p)/p должно быть определено как
для одного целого.
Теоретически
при бесконечном возрастании частоты квантования дискретная система стремится к
соответствующей аналоговой системе. Однако, это не означает, что
![]() (7.37).
(7.37).
Так
как z-преобразование основано на амплитудно-импульсной модуляции, то
устремление T к нулю лишено физического смысла. Другими словами,
если сигнал r(t) поступает на импульсный
элемент, выходным сигналом которого является rd(t), то устремление переиода
квантования к нулю не обеспечивает совпадение r(t) и rd(t). Это объясняет, почему
выражение (7.37) в общем случае не справедливо. Однако если дискретный сигнал rd(t) подать на вход экстраполятора нулевого порядка,
выходным сигналом которого является сигнал hd(t), то при устремлении
периода дискретизации к нулю справедливо соотношение
![]() (7.38),
(7.38),
или
![]() (7.39).
(7.39).
Таким
образом, если непрерывный сигнал послан на идеальный импульсный элемент с
экстраполятором нулевого порядка, то выходной сигнал последнего совпадает с
исходным непрерывным сигналом при устремлении периода дискретизации к нулю.