Лекция №3
«Аналого-цифровое
и цифро-аналоговое преобразование».
В микропроцессорных системах роль импульсного элемента выполняет аналого-цифровой преобразователь (АЦП), а роль экстраполятора – цифро-аналоговый преобразователь (ЦАП).
Аналого-цифровое преобразование
заключается в преобразовании информации, содержащейся в аналоговом сигнале, в
цифровой код. Цифро-аналоговое
преобразование призвано выполнять обратную задачу, т.е. преобразовывать
число, представленное в виде цифрового кода, в эквивалентный аналоговый сигнал.
АЦП,
как правило, устанавливаются в цепях обратных связей цифровых систем управления
для преобразования аналоговых сигналов обратных связей в коды, воспринимаемые
цифровой частью системы. Т.о. АЦП выполняют несколько функций, таких как: временная
дискретизация, квантование по уровню, кодирование. Обобщенная структурная схема
АЦП представлена на рис.3.1.
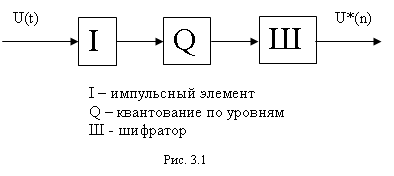
На
вход АЦП подается сигнал в виде тока или напряжения, который в процессе
преобразования квантуется по уровню. Идеальная статическая характеристика
3-разрядного АЦП приведена на рис.3.2.
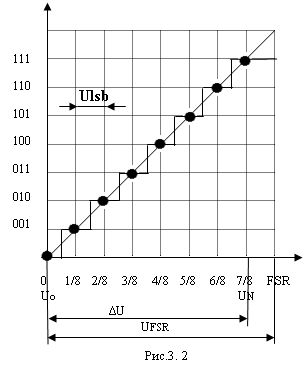
Входные сигналы могут принимать любые значения в
диапазоне от –Umax до Umax, а выходные соответствуют
восьми (23) дискретным уровням. Величина входного напряжения, при
которой происходит переход от одного зачения выходного кода АЦП к другому
соседнему значению, называется напряжением
межкодового перехода. Разность между двумя смежными значениями межкодовых
переходов называется шагом квантования
или единицей младшего значащего разряда
(МЗР). Начальной точкой характеристики преобразования называется точка,
определяемая значением входного сигнала, определяемого как
![]() (3.1),
(3.1),
где U0,1 – напряжение первого
межкодового перехода, ULSB – шаг квантования (LSB – Least Significant Bit). Конечная точка характеристики преобразования соответствует входному
напряжению, определяемому соотношением
![]() (3.2).
(3.2).
Область значений входного напряжения АЦП,
ограниченная значениями U0,1 и UN-1,N
называется диапазоном входного напряжения.
![]() (3.3).
(3.3).
Диапазон входного напряжения и величину младшего
разряда N-разрядного АЦП и ЦАП связывает соотношение
![]() (3.4).
(3.4).
Напряжение
![]() (3.5)
(3.5)
называется напряжением
полной шкалы (FSR – Full Scale Range).
Как правило, этот параметр определяется
уровнем выходного сигнала источника опорного напряжения, подключенного к АЦП.
Величина шага квантования или единицы младшего разряда т.о. равна
![]() (3.6),
(3.6),
а величина единицы старшего значащего разряда
![]() (3.7).
(3.7).
Как видно из рис.3.2, в процессе преобразования
возникает ошибка, не превышающая по величине половины величины младшего разряда
ULSB/2.
Существуют различные методы
аналого-цифрового преобразования, различающиеся между собой по точности и
быстродействию. В большинстве случаев эти характеристики антогонистичны друг
другу. В настоящее время большое распространение получили такие типы преобразователей
как АЦП последовательных приближений (поразрядного уравновешивания),
интегрирующие АЦП, параллельные (Flash) АЦП, «сигма-дельта» АЦП и
др.
Структурная
схема АЦП последовательных приближений представлена на рис.3.3.
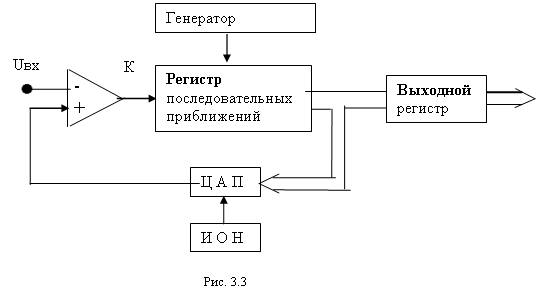
Основными элементами устройства являются компаратор
(К), цифро-аналоговый преобразователь (ЦАП) и схема логического управления.
Принцип преобразования основан на последовательном сравнении уровня входного
сигнала с уровнями сигналов соответствующих различным комбинациям выходного
кода и формировании результирующего кода по результатам сравнений. Очередность
сравниваемых кодов удовлетворяет правилу половинного деления. В начале
преобразования входной код ЦАП устанавливается в состояние, в котором все
разряды кроме старшего равны 0, а старший равен 1. При этой комбинации на
выходе ЦАП формируется напряжение, равное половине диапазона входного
напряжения. Это напряжение сравнивается со входным напряжением на компараторе.
Если входной сигнал больше сигнала, поступающего с ЦАП, то старший разряд
выходного кода устанавливается в 1, в противном случае он сбрасывается в 0. На
следующем такте частично сформированный таким образом код снова поступает на
вход ЦАП, в нем устанавливается в единицу следующий разряд и сравнение повторяется.
Процесс продолжается до сравнения младшего бита. Т.о. для формирования N-разрядного
выходного кода необходимо N одинаковых элементарных
тактов сравнения. Это означает, что при прочих равных условиях быстродействие
такого АЦП уменьшается с ростом его разрядности. Внутренние элементы АЦП
последовательных приближений (ЦАП и компаратор) должны обладать точностными
показателями лучше величины половины младшего разряда АЦП.
Структурная
схема параллельного (Flash) АЦП представлена на
рис.3.4.
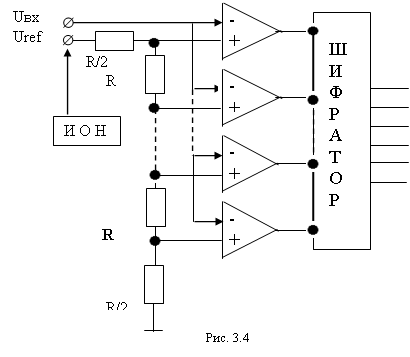
В этом случае входное напряжение подается для
сравнения на одноименные входы сразу N-1 компараторов. На
противоположные входы компараторов подаются сигналы с высокоточного делителя
напряжения, который подключен к источнику опорного напряжения. При этом
напряжения с выходов делителя равномерно распределены вдоль всего диапазона
изменения входного сигнала. Шифратор с приоритетом формирует цифровой выходной
сигнал, соответствующий самому старшему компаратору с активизированным выходным
сигналом. Т.о. для обеспечения N-разрядного преобразования
необходимо 2N резисторов делителя и 2N-1
компаратор. Это один из самых быстрых способов преобразования. Однако, при
большой разрядности он требует больших аппаратных затрат. Точность всех резисторов
делителя и компараторов снова должна быть лучше половины величины младшего
разряда.
Структурная
схема АЦП двойного интегрирования представлена на рис.3.5.
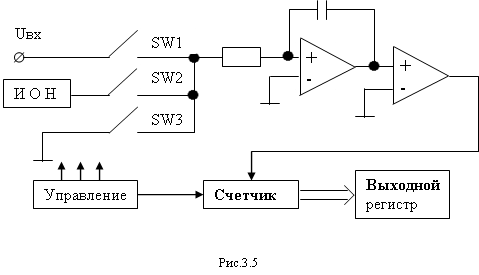
Основными элементами системы являются аналоговый
коммутатор, состоящий из ключей SW1, SW2, SW3, интегратор И, компаратор
К и счетчик С. Процесс преобразования состоит из трех фаз (рис.3.6).
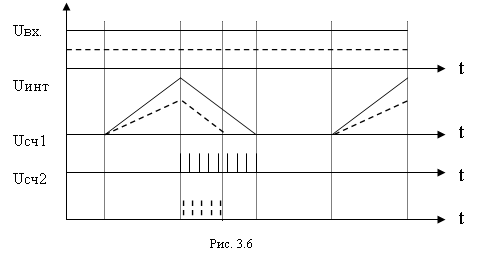
На первой фазе замкнут ключ SW1, а остальные ключи
разомкнуты. Через замкнутый ключ SW1 входное напряжение
подается на интегратор, который в течение фиксированного интервала времени
интегрирует входной сигнал. По истечение этого интервала времени уровень
выходного сигнала интегратора пропорционален значению входного сигнала. На
втором этапе преобразования ключ SW1 размыкается, а ключ SW2
замыкается, и на вход интегратора подается сигнал с источника опорного
напряжения. Конденсатор интегратора разряжается от напряжения, накопленного в
первом интервале преобразования с постоянной скоростью, пропорциональной
опорному напряжению. Этот этап длится до тех пор, пока выходное напряжение
интегратора не упадет до нуля, о чем свидетельствует выходной сигнал
компаратора, сравнивающего сигнал интегратора с нулем. Длительность второго
этапа пропорциональна входному напряжению преобразователя. В течение всего
второго этапа на счетчик помтупают высокочастотные импульсы с калиброванной
частотой. Т.о. по истечению второго этапа цифровые показания счетчика
пропорциональны входному напряжению. С помощью данного метода можно добиться
очень хорошей точности не предъявляя высоких требований к точности и
стабильности компонентов. В часности, стабильность емкости интегратора может
быть не высокой, поскольку циклы заряда и разряда происходят со скоростью,
обратно пропорциональной емкости. Болле того, ошибки дрейфа и смещения
компарптора компенсируются благодаря тому, что каждый этап преобразования
начинается и заканчивается на одном и том же напряжении. Для повышения точности
используется третий этап преобразования, когда на вход интегратора через ключ SW3
подается нулевой сигнал. Поскольку на этом этапе используется тот же интегратор
и компаратор, то вычитание выходного значения ошибки при нуле из результата
последующего измерения позволяет компенсировать ошибки, связанные с измерениями
вблизи нуля. Жесткие требования не предъявляются даже к частоте тактовых
импульсов, поступающих на счетчик, т.к. фиксированный интервал времени на
первом этапе преобразования формируется из тех же самых импульсов. Жесткие
требования предъявляются только к току разряда, т.е. к источнику опорного
напряжения. Недостатком такого способа преобразования является невысокое
быстродействие.
АЦП характеризуютя рядом
параметров, позволяющих реализовать выбор конкретного устройства исходя из
требований, предъявляемых к системе. Все параметры АЦП можно разделить на две
группы: статические и динамические. Первые определяют точностные характеристики
устройства при работе с неизменяющимся либо медленно изменяющимся входным
сигналом, а вторые характеризуют быстродействие устройства как сохранение точности
при увеличении частоты входного сигнала.
Уровню квантования, лежащему
в окрестностях нуля входного сигнала соответствуют напряжения межкодовых
переходов –0.5ULSB и 0.5ULSB (первый имеет место только
в случае биполярного входного сигнала). Однако, в реальных устройствах,
напряжения данных межкодовых переходов могут отличаться от этих идеальных
значений. Отклонение реальных уровней этих напряжений межкодовых переходов от их идеальных значений
называется ошибкой биполярного смещения
нуля (Bipolar Zero Error) и
ошибкой униполярного смещения нуля (Zero Offset Error) соответственно. При
биполярных диапазонах преобразования обычно используют ошибку смещения нуля, а
при униполярных – ошибку униполярного смещения. Эта ошибка приводит к
параллельному смещению реальной характеристики преобразования относительно
идеальной характеристики вдорль оси абсцисс (рис.3.7).
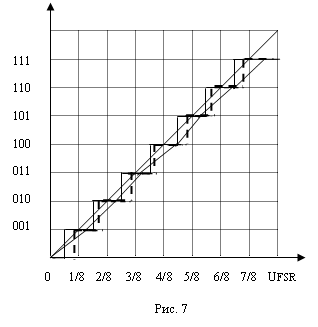
Отклонение уровня входного сигнала
соответствующего последнему межкодовому переходу от своего идеального значения UFSR-1.5ULSB, называется ошибкой полной шкалы (Full Scale Error).
Коэффициентом преобразования АЦП называется тангенс угла наклона прямой, проведенной
через начальную и конечную точки реальной характеристики преобразования.
Разность между действительным и идеальным значением коэффициента преобразования
называется ошибкой коэффициента
преобразования (Gain Error) (рис.3.7). Она включает ошибки на концах шкалы, но не
включает ошибки нуля шкалы. Для униполярного диапазона она определяется как
разность между ошибкой полной шкалы и ошибкой униполярного смещения нуля, а для
биполярного диапазона – как разность между ошибкой полной шкалы и ошибкой
биполярного смещения нуля. По сути дела в любом случае это отклонение
идеального расстояния между последним и первым межкодовыми переходами (равного UFSR-2ULSB) от его реального значения.
Ошибки смещения нуля и
коэффициента преобразования можно скомпенсировать подстройкой предварительного
усилителя АЦП. Для этого необходимо иметь вольтметр с точностью не хуже 0.1 ULSB. Для независимости этих двух ошибок сначала корректируют ошибку
смещения нуля, а затем, ошибку коэффициента преобразования. Для коррекции ошибки смещения нуля АЦП необходимо:
1. Установить входное
напряжение точно на уровне 0.5 ULSB;
2. Подстраивать смещение
предварительного усилителя АЦП до тех пор, пока АЦП не переключится в состояние
00…01.
Для коррекции ошибки
коэффициента преобразования необходимо:
1. Установить входное
напряжение точно на уровне UFSR-1.5 ULSB;
2. Подстраивать коэффициент
усиления предварительного усилителя АЦП до тех пор, пока АЦП не переключится в
состояние 11…1.
Из-за не идеальности
элементов схемы АЦП ступеньки в различных точках характеристики АЦП отличаются
друг от друга по величине и не равны ULSB (рис.3.8).
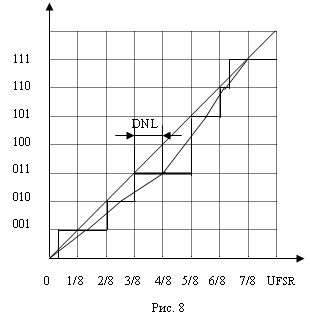
Отклонение расстояния между серединами двух соседних
реальных шагов квантования от идеального значения шага квантования ULSB называется дифференциальной
нелинейностью (DNL – Differential Nonlinearity). Если DNL
больше или равна ULSB, то у АЦП могут появиться так называемые
“пропущенные коды” (рис.3.3). Это влечет локальное резкое изменение
коэффициента передачи АЦП, что в замкнутых системах управления может привести к
потере устойчивости.
Для
тех приложений, где важно поддерживать выходной сигнал с заданной точностью,
важно на солько точно выходные коды АЦП соответствуют напряжениям межкодовых
переходов. Максимальное отклонение центра шага квантования на реальной
характеристике АЦП от линеаризованной характеристики называется интегральной нелинейностью (INL – Integral Nonlinearity) или
относительной точностью (Relative
Accuracy) АЦП
(рис.3.9).
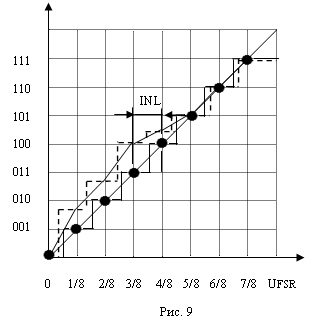
Линеаризованная характеристика проводится через
крайние точки реальной характеристики преобразования, после того, как они были
откалиброваны, т.е. устранены ошибки смещения нуля и коэффициента
преобразования.
Ошибки
дифференциальной и интегральной нелинейности скомпенсировать простыми
средствами практически невозможно.
Разрешающей
способностью АЦП (Resolution) называется величина,
обратная максимальному числу кодовых комбинаций на выходе АЦП
![]() (3.8).
(3.8).
Этот параметр определяет какой минимальный уровень
входного сигнала (относительно сигнала полной амплитуды) способен воспринимать
АЦП.
Точность и разрешающая способность – две независимые
характеристики. Разрешающая способность играет определяющую роль тогда, когда
важно обеспечить заданный динамический диапазон входного сигнала. Точность
является определяющей, когда требуется поддерживать регулируемую величину на
заданном уровне с фиксированной точностью.
Динамическим диапазоном АЦП ( DR - Dinamic Range)
называется отношение максимального воспринимаемого уровня входного напряжения к
минимальному, выраженное в дБ
![]() (3.9).
(3.9).
Этот параметр определяет максимальное количество
информации, которое способен передавать АЦП. Так, для 12-разрядного АЦП DR=72 дБ.
Характеристики реальных АЦП
отличаются от характеристик идеальных устройств из-за неидеальности элементов
реального устройства. Рассмотрим некоторые параметры, характеризующие реальные
АЦП.
Отношением
сигнал-шум (SNR – Signal to Noise Ratio) называется отношение
среднеквадратического значения входного синусоидального сигнала к
среднеквадратическому значению шума, который определяется как сумма всех
остальных спектральных компонент вплоть до половины частоты дискретизации, без
учета постоянной составляющей. Для идеального N-разрядного АЦП, который генерирует лишь шум квантования SNR, выражаемый в децибелах, можно определить как
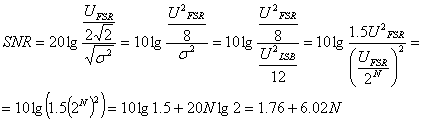 (3.10),
(3.10),
где N – разрядность АЦП. Так, для
12-разрядного идеального АЦП SNR=74 дБ. Это значение больше
значения динамического диапазона такого же АЦП т.к. минимальный уровень
воспринимаемого сигнала должен быть больше уровня шума. В данной формуле
учитывается только шум квантования и не учитываются другие источники шума,
существующие в реальных АЦП. Поэтому, значения SNR для реальных АЦП как
правило ниже идеального. Типичным значением SNR для реального 12-разрядного
АЦП является 68-70 дБ.
Если входной сигнал имеет
размах меньше UFSR, то в последнюю формулу нужно внести
корректировку
![]() (3.11),
(3.11),
где КОС – ослабление входного сигнала,
выраженное в дБ. Так, если входной сигнал 12-разрядного АЦП имеет амплитуду в
10 раз меньше половины напряжения полной шкалы, то КОС=-20 дБ и SNR=74
дБ – 20 дБ=54 дБ.
Значение
реального SNR может быть использовано для определения эффективного количества разрядов АЦП (ENOB – Effective Number of Bits). Оно
определяется по формуле
![]() (3.12).
(3.12).
Этот показатель может характеризовать действительную
решающую способность реального АЦП, Так, 12-разрядный АЦП, у которого SNR=68 дБ
для сигнала с КОС=-20 дБ является на самом деле 7-разрядным (ENOB=7.68).
Значение ENOB сильно зависит от частоты входного сигнала, т.е.
эффективная разрядность АЦП падает с увеличением частоты.
Суммарный коэффициент гармоник (THD – Total Harmonic Distortion) – это отношение суммы
среднеквадратических значений всех высших гармоник к среднеквадратическому
значению основной гармоники
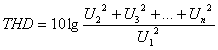 (3.13),
(3.13),
где n обычно ограничивают на
уровне 6 или 9. Этот параметр характеризует уровень гармонических искажений
выходного сигнала АЦП по сравнения с входным. THD возрастает с частотой
входного сигнала.
Полоса частот полной мощности (FPBW – Full Power Bandwidth) – это максимальная частота
входного сигнала с размахом, равным полной шкале, при которой амплитуда
восстановленной основной составляющей уменьшается не более чем на 3 дБ. С
ростом частоты входного сигнала аналоговые цепи АЦП перестают успевать
отрабатывать его изменения с заданной точностью, что приводит к уменьшению
коэффициента преобразования АЦП на высоких частотах.
Время установления (Settling Time) – это время, необходимое
АЦП для достижения номинальной точности после того, как на ее вход был подан
ступенчатый сигнал с амплитудой, равной полному диапазону входного сигнала. Этот параметр ограничен
из-за конечного быстродействия различных узлов АЦП.
Вследствие
различного рода погрешностей характеристика реального АЦП является нелинейной.
Если на вход устройства с нелинейностями подать сигнал, спектр которого состоит
из двух гармоник fa и fb, то в спектре выходного
сигнала такого устройства кроме основных гармоник будут присутствовать
интермодуляционные субгармоники с частотами ![]() ,
где m,n=1,2,3,… Субгармоники второго порядка – это fa+fb, fa-fb, субгармоники третьего
порядка – это 2fa+fb, 2fa-fb, fa+2fb, fa-2fb. Если входные синусоиды
имеют близкие частоты, расположенные вблизи верхнего края полосы пропускания,
то субгармоники второго порядка далеко отстоят от входных синусоид и
располагаются в области нижних частот, тогда как субгармоники третьего порядка
имеют частоты, близкие к входным частотам.
,
где m,n=1,2,3,… Субгармоники второго порядка – это fa+fb, fa-fb, субгармоники третьего
порядка – это 2fa+fb, 2fa-fb, fa+2fb, fa-2fb. Если входные синусоиды
имеют близкие частоты, расположенные вблизи верхнего края полосы пропускания,
то субгармоники второго порядка далеко отстоят от входных синусоид и
располагаются в области нижних частот, тогда как субгармоники третьего порядка
имеют частоты, близкие к входным частотам.
Коэффициент интермодуляционных искажений
(Intermodulatin Distortion) – это отношение суммы
среднеквадратических значений интермодуляционных субгармоник определенного
порядка к сумме среднеквадратических значений основных гармоник, выраженное в
дБ
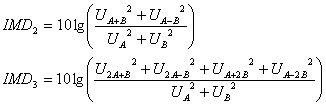 (3.14).
(3.14).
Любой
способ аналого-цифрового преобразования требует некоторого конечного времени
для его выполнения. Под временем
преобразования АЦП (Conversion Time)
понимается интервал времени от момента поступления аналогового сигнала на вход
АЦП до момента появления соответствующего выходного кода. Если входной сигнал
АЦП изменяется во времени, то конечное время преобразования АЦП приводит к
появлению т.н. аппертурной погрешности (рис.3.10).
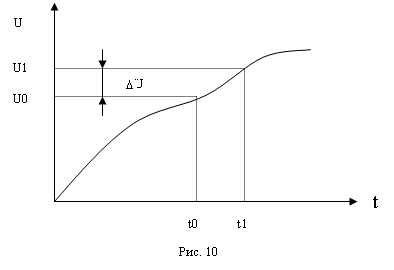
Сигнал начала преобразования поступает в момент t0, а выходной код появляется
в момент t1. За это время входной сигнал успел измениться на
величину DU.
Возникает неопределенность: какому уровню значения входного сигнала в диапазоне
U0
– U0+DU соответствует данный
выходной код. Для сохранения точности преобразования на уровне единицы младшего
разряда необходимо чтобы за время преобразования изменение значения сигнала на
входе АЦП составило бы не более величины единицы младшего разряда
![]() (3.15).
(3.15).
Изменение уровня сигнала за время преобразования
можно приблизительно вычислить как
 (3.16),
(3.16),
где Uin – входное напряжение АЦП, Tc – время преобразования. Подставляя (3.16) в (3.15) получим
![]() (3.17).
(3.17).
Если на входе действует синусоидальный сигнал с
частотой f
![]() (3.18),
(3.18),
то его производная будет равна
![]() (3.19).
(3.19).
Она принимает максимальное значение когда косинус
равен 1. Подставляя с учетом этого (3.9) в (3.7) получим
![]() ,
или
,
или
![]() (3.20)
(3.20)
Конечное время преобразования АЦП приводит к
требованию ограничения скорости изменения входного сигнала. Для того, чтобы
уменьшить апертурную погрешность и т.о. ослабить ограничение на скорость
изменения входного сигнала АЦП на входе преобразователя устанавливается т.н.
«устройство выборки-хранения» (УВХ) (Track/Hold Unit).
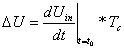
Упрощенная схема УВХ представлена на рис.3.11.
Это устройство имеет два режима работы: режим
выборки и режим фиксации. Режим выборки соответствует замкнутому состоянию ключа
SW. В этом режиме выходное напряжение УВХ повторяет его входное
напряжение. Режим фиксации включается по команде размыкающей ключ SW. При
этом связь между входом и выходом УВХ прерывается, а выходной сигнал
поддерживается на постоянном уровне, соответствующем уровню входного сигнала на
момент поступления команды фиксации за счет заряда, накопленного на
конденсаторе. Т.о., если подать команду фиксации непосредственно перед началом
преобразования АЦП, то выходной сигнал УВХ будет поддерживаться на неизменном
уровне в течение всего времени преобразования. После окончания преобразования
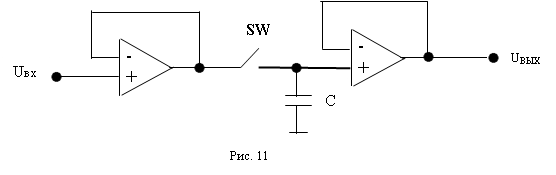
УВХ снова переводится в режим выборки. Работа реального УВХ несколько
отличается от идеального случая, который был описан (рис.3.12).
Если за время хранения сигнал на входе УВХ
значительно изменился по отношению к его выходному сигналу, то требуется
конечное некоторое время для того, что бы после снятия команды фиксации они
сравнялись. Интервал времени от момента снятия команды фиксации до момента,
когда выходной сигнал УВХ станет равным входному с погрешностью 0.5ULSB, называется временем выборки УВХ (Track/Hold Acquisiton Time). Вследствие конечного быстродействия элементов
управления УВХ момент поступления команды фиксации и момент действительного
размыкания ключа SW несколько отстоят друг от друга. Интервал времени от момента поступления
команды фиксации до действительного момента начала фиксации называется апертурной задержкой УВХ (Aperture Delay). Оно
определяется временем срабатывания переключающей схемы УВХ. В реальных УВХ
сигнал синхронизации оказывается модулирован по фазе из-за паразитного
воздействия шумов, помех питания и цифровых линий. В следствие этого величина
апертурной задержки УВХ может варьироваться в некоторых пределах от выборки к
выборке. Диапазон вариации апертурной задержки в последовательных отсчетах
называвется апертурной неопределенностью
(Aperture Jitter). Этот эффект
воспринимается как дополнительный шум и снижает действительное отношение
сигнал-шум на величину
![]() (3.21),
(3.21),
где f – частота входного сигнала,
tA – величина апертурной неопределенности.
В реальных УВХ выходной
сигнал не может оставаться абсолютно неизменным в течение конечного времени
преобразования. Конденсатор будет постепенно разряжаться маленьким входным
током выходного буфера. Для сохранения требуемой точности необходимо чтобы за
время преобразования заряд конденсатора не изменился больше чем на 0.5ULSB.
Цифро-аналоговые преобразователи устанавливаются обычно на выходе микропроцессорной
системы для преобразования ее выходных кодов в аналоговый сигнал, подаваемый на
непрерывный объект регулирования. Идеальная статическая характеристика
3-разрядного ЦАП представлена на рис.3.13.
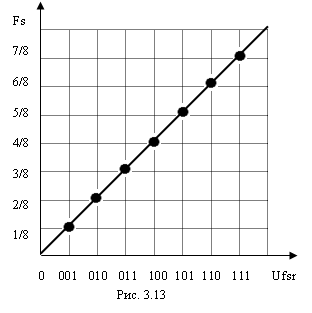
Начальная точка характеристики определяется как
точка, соответствующая первому (нулевому) входному коду U00…0. Конечная точка характеристики определяется как точка, соответствующая последнему входному коду U11…1. Определения диапазона
выходного напряжения, единицы младшего разряда квантования, ошибки смещения
нуля, ошибки коэффициента преобразования аналогичны соответствующим
характеристикам АЦП.
С точки зрения структурной
организации у ЦАП наблюдается гораздо меньшее разнообразие вариантов построения
преобразователя. Основной структурой ЦАП является т.н. “цепная R-2R схема”
(рис.3.14).
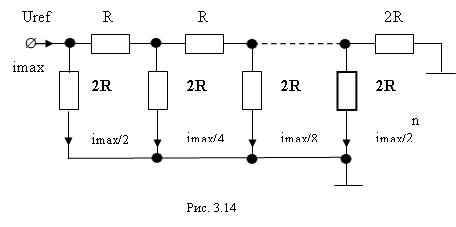
Легко показать, что входной ток схемы равен Iin=UREF/R, а токи последовательных
звеньев цепи соответственно Iin/2, Iin/4, Iin/8 и т.д. Для преобразования
входного цифрового кода в выходной ток достаточно собрать все токи плечей,
соответствующих единицам во входном коде, в выходной точке преобразователя
(рис.3.15).
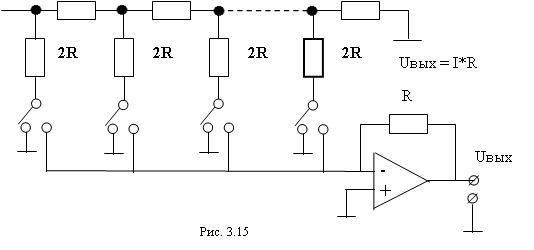
Если к выходной точке
преобразователя подключить операционный усилитель, то выходное напряжение можно
определить как
![]() (3.22),
(3.22),
где K – входной цифровой код, N –
разрядность ЦАП.
Все
существующие ЦАП делятся на две больших группы: ЦАП с выходом по току и ЦАП с
выходом по напряжению. Различие между ними заключается в отсутствии или наличии
у микросхемы ЦАП оконечного каскада на операционном усилителе. ЦАП с выходом по
напряжению являются более завершенными устройствами и требуют меньше
дополнительных элементов для своей работы. Однако, оконечный каскад наряду с
параметрами лесничной схемы определяет динамические и точностные параметры ЦАП.
Выполнить точный быстродействующий операционный усилитель на одном кристалле с
ЦАП часто бывает затруднительно. Поэтому большинство быстродействующих ЦАП
имеют выход по току.
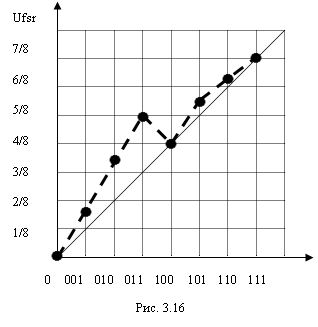
Дифференциальная нелинейность для ЦАП
определяется как отклонение расстояния между двумя соседними уровнями выходного
аналогового сигнала от идеального значения ULSB. Большое значение
дифференциальной нелинейности может привести к тому, что ЦАП станет
немонотонным. Это означает, что увеличение цифрового кода будет приводить к
уменьшению выходного сигнала на каком нибудь участке характеристики (рис.3.16).
Это может приводить к нежелательной генерации в системе.
Интегральная нелинейность для ЦАП определяется как наибольшее отклонение
уровня аналогового выходного сигнала от прямой линии, проведенной через точки,
соответствующие первому и последнему коду, после того, как они отрегулированы.
Время установления ЦАП определяется как
время, за которое выходной сигал ЦАП установится на заданном уровне с
погрешностью не более 0.5ULSB после того, как входной код
изменился со значения 00…0 до значения 11…1. Если ЦАП имеет входные регистры,
то определенная часть времени установления обусловлена фиксированной задержкой
прохождения цифровых сигналов, и лишь оставшаяся часть – инерционностью самой
схемы ЦАП. Поэтому время установления измеряют обычно не от момента поступления
нового кода на вход ЦАП, а от момента начала изменения выходного сигнала,
соответствующего новому коду, до момента установления выходного сигнала с
точностью 0.5ULSB (рис.3.17).
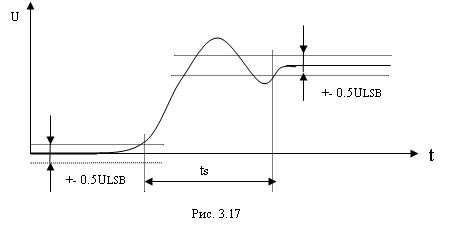
В этом случае время установления определяет
максимальную частоту стробирования ЦАП
![]() (3.23),
(3.23),
где tS – время установления.
Входные цифровые цепи ЦАП имеют конечное быстродействие. В добавок,
скорость распространения сигналов, соответствующих различным разрядом входного
кода, неодинакова вследствие разброса параметров элементов и схемных
особенностей. В результате этого плечи лестничной схемы ЦАП при поступлении
нового кода переключаются не синхронно, а с некоторой задержкой один
относительно другого. Это приводит к тому, что в диаграмме выходного напряжения
ЦАП, при переходе от одного установившегося значения к другому наблюдаются
выбросы различной амплитуды и направленности (рис.3.18).
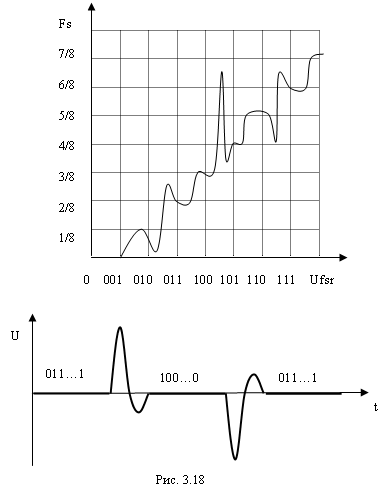
Амплитуда выброса зависит от количества изменяющихся
разрядов кода при переходе его от одного значения к другому. Наибольшие выбросы
наблюдаются в середине шкалы, где изменяются сразу все разряды кода (это
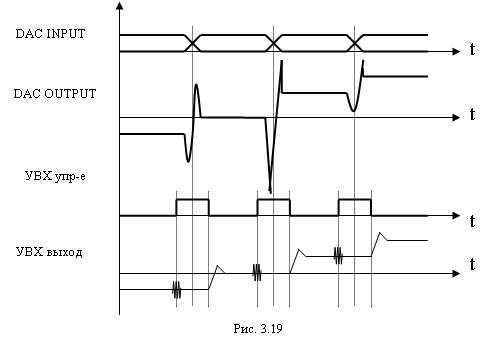
переходы 011…1 – 100…0 и 100…0 – 011…1). Как видно из рис.3.19, эти выбросы
неодинаковы. Таким образом, эти выбросы являются кодозависимыми, т.е. их
амплитуда и полярность зависти от соответствующего перехода кодов. Два самых больших
выброса, которые образуются в середине шкалы ЦАП появляются дважды за период
восстановления синусоидального сигнала. Это означает, что они добавляют в
спектр выходного сигнала ЦАП вторую гармонику относительно восстанавливаемого
сигнала и субгармоники высшего порядка. Эти паразитные спектральные
составляющие очень плохо фильтруются т.к. располагаются либо ниже половины
частоты дискретизации, либо ненамного выше от нее. Эти выбросы характеризуются
таким параметром как область выброса
(Glitch Area), который определяет
максимальную площадь под кривой выброса и измеряется в пВ сек или нВ сек. Для
уменьшения выбросов на выходе ЦАП можно установить УВХ, который вводить в режим
фиксации непосредственно перед очередной сменой кода, а выводить из фиксации
уже после завершения выброса (рис.3.19). Это позволит значительно уменьшить
результирующий коэффициент гармоник выходного сигнала ЦАП.
Согласно алгоритму работы,
ЦАП представляет из себя экстраполятор нулевого порядка, частотная характеристика
которого может быть представлена выражением
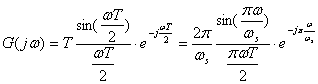 (3.24),
(3.24),
где ws
– частота дискретизации. Амплитудно-частотная характеристика ЦАП представлена
на рис.3.20.
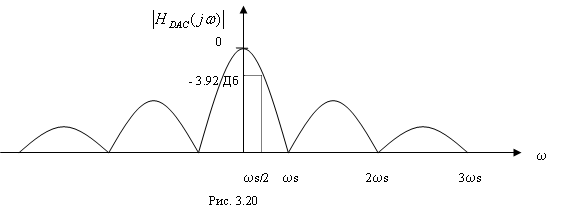
Как видно, на частоте 0.5ws восстанавливаемый сигнал
ослабляется на 3.92 дБ по сравнению с низкочастотными составляющими сигнала.
Таким образом, имеет место небольшое искажение спектра восстанавливаемого
сигнала. В большинстве случаев это небольшое искажение не сказывается
значительно на параметрах системы. Однако, в тех случаях, когда необходима
повышенная линейность спектральных характеристик системы (например в системах
обработки звука), для выравнивания результирующего спектра на выходе ЦАП
необходимо ставить специальный восстанавливающий фильтр с частотной характеристикой
типа x/sin(x).